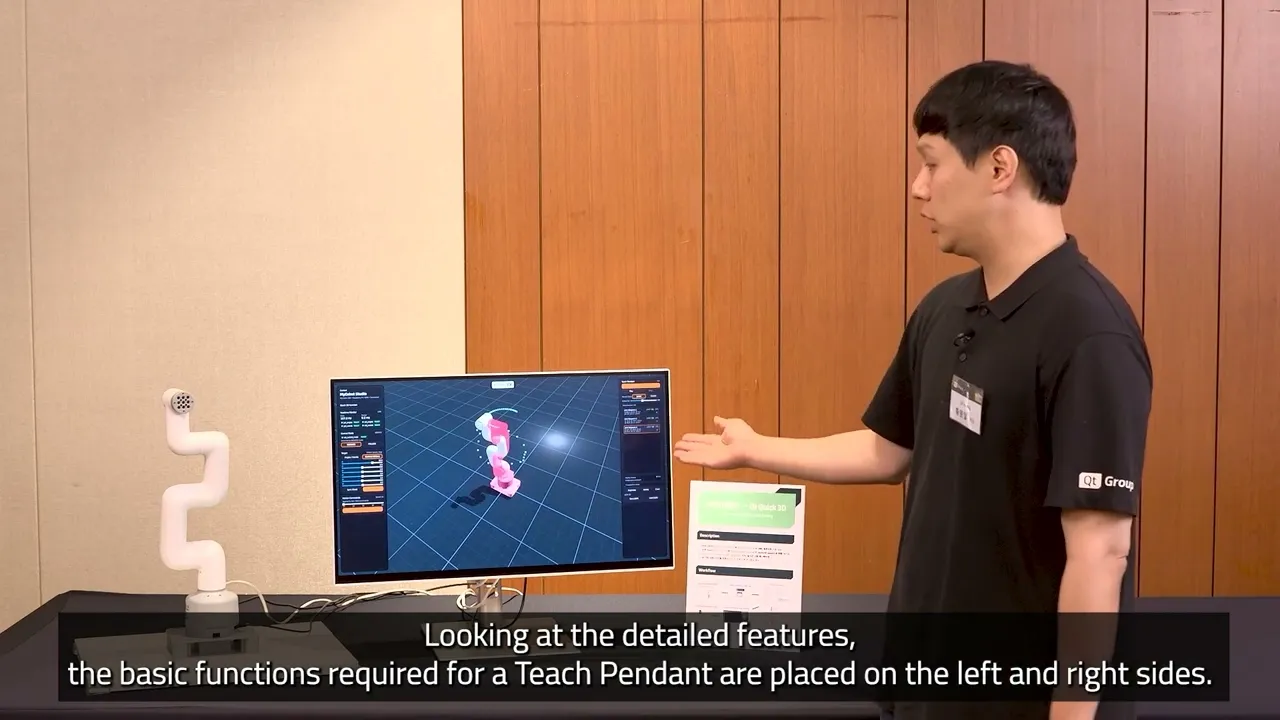
URDF to QML: Prototyping a Teach Pendant App with Qt Quick 3D
In this demo, Eric Hwang, Business Development Engineer, shows how to build a Teach Pendant by converting ROS URDF data into a Qt Quick 3D / QML application—without manually authoring 3D scene code. What the demo covers: → Parsing a URDF file with Python to extract joint, link, and mesh data → Auto-generating QML from the parsed URDF structure → Converting 3D meshes with the Qt Quick 3D Balsam Importer → Exposing joint values as QML properties to drive a 2D control UI → Implementing a record-and-playback feature via the ROS connection layer The result: a functional Teach Pendant UI—2D control panels plus a live 3D robot visualization—built in a fraction of the time required by a manual workflow.
Oh, here is more
On-Demand Webinar: Agentic Development for Embedded Devices: From Experiment to Production
Agentic development for embedded devices is moving from experiment to production, and regulated indu...
Watch Video
CRA-ready in der industriellen Automatisierung: Von der Entwicklung bis zur Integration
Industrielle Softwareteams arbeiten unter zunehmendem Druck - knappe Budgets, CRA-Compliance-Fristen...
Watch Video
Video Podcast: Five Things From Auto China 2026 That Should Change Your SDV Roadmap
The modern in-vehicle experience starts in the architecture underneath the cockpit. The world’s bigg...
Watch Video